Back to Top
EL7031 EtherCAT Terminal, 1-channel motion interface, stepper motor, 24 V DC, 1.5 A
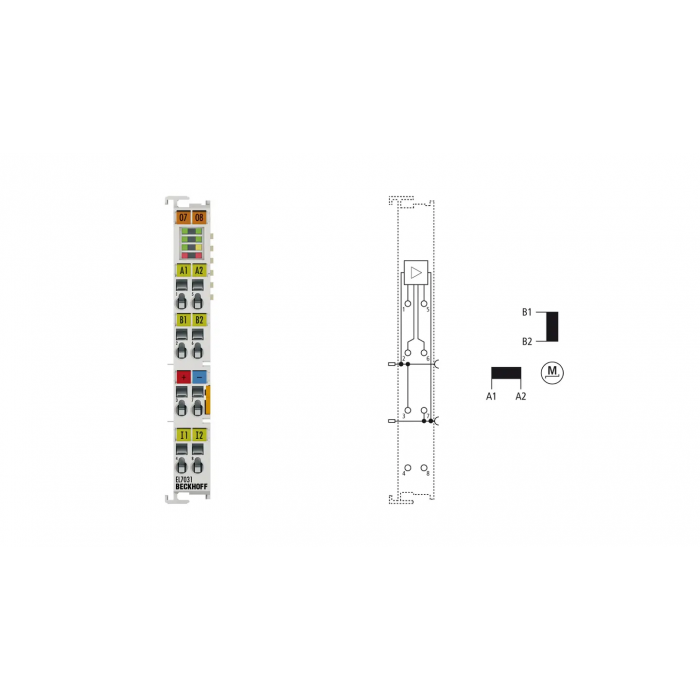
Connection method: direct motor connection
Number of inputs: 2 x end position
Load type: 2-phase stepper motor (uni-/bipolar)
Number of channels: 1
Number of outputs: 1 x stepper motor
Supply voltage electronics: 24 V DC (via power contacts)
Supply voltage power: 24 V DC (internally via power contacts)
Output current: max. 1.5 A
Step frequency: configurable up to 8000 full steps/s
Step pattern: 64-fold micro stepping
Current controller frequency: approx. 25 kHz
Resolution: approx. 5000 positions in typ. applications (per revolution)
Current consumption: power contacts typ. 30 mA + motor current
Current consumption: E-bus typ. 120 mA
Distributed clocks: yes
Special features: travel distance control
Electrical isolation: 500 V (E-bus/field potential)
Relative humidity 95 %,: no condensation
Weight: approx. 50 g
Operating/storage temperature: 0…+55 °C/-25…+85 °C
EMC immunity/emission: conforms to EN 61000-6-2/EN 61000-6-4
Vibration/shock resistance :conforms to EN 60068-2-6/EN 60068-2-27
Protect. rating/installation pos.: IP20/see documentation
Pluggable wiring for all ESxxxx terminals
Approvals/markings: CE, UL
The EL7031 EtherCAT Terminal is intended for the direct connection of stepper Motors in the low power range up to 1.5 A. The compact stepper motor output stage is accommodated in the EtherCAT Terminal together with two digital inputs for limit switches.
| SKU | EL7031 |
|---|
Write Your Own Review
Write your content here...

