Back to Top
EL7211-9014 EtherCAT Terminal, 1-channel motion interface, servomotor, 48 V DC, 4.5 A, OCT, suitable for STO applications
Technology: compact drive technology
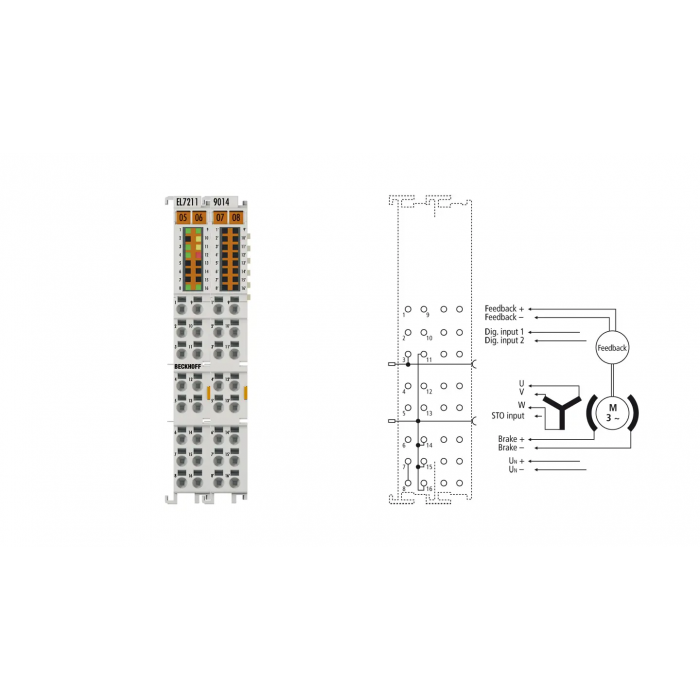
Connection method: direct motor connection with OCT
Number of inputs: 2 x end position, 1 x feedback, 1 x STO
Load type: permanent magnet-excited three-phase synchronous motor
Number of channels: 1
Number of outputs: 1 x servomotor, 1 x motor brake
Supply voltage electronics: 24 V DC (via power contacts)
Supply voltage power: 8…48 V DC (external)
Output current (rms): 4.5 A
Peak current (rms): max. 9.0 A for 1 s
Performance increase –
Output current with ZB8610 (rms) –
Peak current with ZB8610 (rms) –
Rotating field frequency 0…599 Hz
PWM clock frequency: 16 kHz
Current controller frequency: 32 kHz
Rated speed controller frequency: 16 kHz
Output voltage motor brake: 24 V DC
Output current motor brake: max. 0.5 A
Current consumption power contacts: typ. 100 mA + holding current motor brake
Current consumption E-bus: typ. 120 mA
Distributed clocks: yes
Realization STO: hard-wired via safe output
Special features: compact, absolute feedback, One Cable Technology (OCT), plug and play, integrated track control
Safe stop functions: Safe Torque Off (STO)
Electrical isolation: 500 V (E-bus/field potential)
Weight: approx. 95 g
Operating/storage temperature: 0…+55 °C/-25…+85 °C
Relative humidity: 95 %, no condensation
EMC immunity/emission: conforms to EN 61000-6-2/EN 61000-6-4
Vibration/shock resistance: conforms to EN 60068-2-6/EN 60068-2-27
Protect. rating/installation pos.: IP20/see documentation
Approvals/markings: CE, UL
The EL7211-9014 servomotor EtherCAT Terminal with integrated One Cable Technology (OCT) offers high servo performance in a very compact design for motors from the AM8100 up to 4.5 A
| SKU | EL7211-9014 |
|---|
Write Your Own Review
Write your content here...

